| [1] |
马丽丽, 白春美, 周新原, 等. 低温贮藏对高品质番茄果实采后生理的影响. 北方园艺, 2023(14):97-104.
|
|
MA L, BAI C, ZHOU X, et al. Effects of low temperature storageon postharvest physiological of high-quality tomato fruit. Northern Horticulture, 2023(14):97-104.
|
| [2] |
李天华, 孙萌, 丁小明, 等. 基于YOLO v4 + HSV 的成熟期番茄识别方法. 农业工程学报, 2021, 37(21):183-190.
|
|
LI T, SUN M, DING X, et al. Tomato recognition method at the ripening stage based on YOLO v4 and HSV. Transactions of the CSAE, 2021, 37(21):183-190.
|
| [3] |
宋怀波, 尚钰莹, 何东健. 果实目标深度学习识别技术研究进展. 农业机械学报, 2023, 54(1):1-19.
|
|
SONG H, SHANG Y, HE D. Review on deep learning technology for fruit target recognition. Transactions of the Chinese Society for Agricultural Machinery, 2023, 54(1):1-19.
|
| [4] |
王瑾, 王瑞荣, 李晓红. 番茄采摘机器人目标识别方法研究. 江苏农业科学, 2021, 49(20):217-222.
|
|
WANG J, WANG R, LI X. Study on target recognition method of tomato picking robot. Jiangsu Agricultural Sciences, 2021, 49(20):217-222.
|
| [5] |
冯青春, 程伟, 杨庆华, 等. 基于线结构光视觉的番茄重叠果实识别定位方法研究. 中国农业大学学报, 2015, 20(4):100-106.
|
|
FENG Q, CHENG W, YANG Q, et al. Identification and localization of overlapping tomatoes based on linear structured light vision system. Journal of China Agricultural University, 2015, 20(4):100-106.
|
| [6] |
孙建桐, 孙意凡, 赵然, 等. 基于几何形态学与迭代随机圆的番茄识别方法. 农业机械学报, 2019, 50(S1):22-26+61.
|
|
SUN J, SUN Y, ZHAO R, et al. Tomato recognition method based on iterative random circle and geometric morphology. Transactions of the Chinese Society of Agricultural Machinery, 2019, 50(S1):22-26+61.
|
| [7] |
李寒, 张漫, 高宇, 等. 温室绿熟番茄机器视觉检测方法. 农业工程学报, 2017, 33(S1):328-334.
|
|
LI H, ZHANG M, GAO Y, et al. Green ripe tomato detection method based on machine vision in greenhouse. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(z1):328-334.
|
| [8] |
韩鑫, 余永维, 杜柳青. 基于改进单次多框检测算法的机器人抓取系统. 计算机应用, 2020, 40(8):2434-2440.
doi: 10.11772/j.issn.1001-9081.2019122234
|
|
HAN X, YU Y, DU L. Robotic grasping system based on improved single shot multibox detector algorithm. Journal of Computer Applications, 2020, 40(8):2434-2440.
doi: 10.11772/j.issn.1001-9081.2019122234
|
| [9] |
SEO D M, WOO H J, KIM M S, et al. Identification of asbestos slates in buildings based on faster region- based convolutional neural network (Faster R-CNN) and drone-based aerial imagery. Drones, 2022, 6(8):194.
|
| [10] |
GIRSHICK R. Fast r-cnn[C]. Proceedings of the IEEE international conference on computer vision. 2015:1440-1448.
|
| [11] |
周云成, 许童羽, 郑伟, 等. 基于深度卷积神经网络的番茄主要器官分类识别方法. 农业工程学报, 2017, 33(15):219-226.
|
|
ZHOU Y, XU T, ZHENG W, et al. Classification and recognition approaches of tomato main organs based on DCNN. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(15):219-226.
|
| [12] |
REDMON J, DIVVALA. You only look once: Unified, real-time object detection[C]. Proceedings of the IEEE conference on computer vision and pattern recognition. 2016:779-788.
|
| [13] |
JIANG P Y, ERGU D J, LIU F Y, et al. A review of YOLO algorithm developments. Procedia Computer Science, 2022, 199:1066-1073.
|
| [14] |
PIRASTEH S, RASHIDI P, RASTIVEIS H, et al. Developing an algorithm for buildings extraction and determining changes from airborne LiDAR, and comparing with R-CNN method from drone images. Remote Sensing, 2019, 11 (11):1272.
|
| [15] |
LIU S, QI L, QIN H, et al. Path aggregation network for instance segmentation[C]. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. Salt Lake City, 2018:8759-8768.
|
| [16] |
刘芳, 刘玉坤, 林森, 等. 基于改进型YOLO的复杂环境下番茄果实快速识别方法. 农业机械学报, 2020, 51(6):229-237.
|
|
LIU F, LIU Y, LIN S, et al. Fast recognition method for tomatoes under complex environments based on improved YOLO. Transactions of the Chinese Society of Agricultural Machinery, 2020, 51(6):229-237.
|
| [17] |
JUN J, KIM J, SEOL J, et al. Towards an efficient tomato harvesting robot:3D percetion, manipulation, and end-effector. IEEE Access, 2021, 9:17631-17640.
|
| [18] |
REDMON J, FARHADI A. YOLOv3:An incremental improvement[EB/OL]. 2018: 1804.02767. http:/arxiv.org/abs/1804.02767v1.
|
| [19] |
孙丰刚, 王云露, 兰鹏, 等. 基于改进YOLOv5s和迁移学习的苹果果实病害识别方法. 农业工程学报, 2022, 38(11):171-179.
|
|
SUN F G, WANG Y L, LAN P, et al. Identification of apple fruit diseases using improved YOLOv5s and transfer learning. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(11):171-179.
|
| [20] |
朱智惟, 单建华, 余贤海, 等. 基于YOLOv5s的番茄采摘机器人目标检测技术. 传感器与微系统, 2023, 42(6):129-132.
|
|
ZHU Z, SHAN J, YU X, et al. Target detection technology of tomato picking robot based on YOLOv5s. Transducer and Microsystem Technologies, 2023, 42(6):129-132.
|
| [21] |
赵元龙, 单玉刚, 袁杰. 改进YOLOv7与DeepSORT的佩戴口罩行人跟踪. 计算机工程与应用, 2023, 59(6):221-230.
doi: 10.3778/j.issn.1002-8331.2210-0479
|
|
ZHAO Y, SHAN Y, YUAN J. Wearing mask pedestrian tracking based on improved YOLOv7 and DeepSORT. Computer Engineering and Applications, 2023, 59(6):221-230.
doi: 10.3778/j.issn.1002-8331.2210-0479
|
| [22] |
苗荣慧, 李志伟, 武锦龙. 基于改进YOLO v7的轻量化樱桃番茄成熟度检测方法. 农业机械学报, 2023, 54(10):225-233.
|
|
MIAO R H, LI Z W, WU J L. Lightweight maturity detection of cherry tomato based on improved YOLO v7. Transactions of the Chinese Society of Agricultural Machinery, 2023, 54(10):225-233.
|
| [23] |
TERVEN J, CORDOVA-ESPARZA D. A comprehensive review of YOLO:From YOLOv1 to YOLOv8 and beyond[EB/OL]. arXiv:2304.00501, 2023.
|
| [24] |
REIS D, KUPEC J, HONG J, et al. Real-time flying object detection with YOLOv8. arXiv:2305.09972, 2023.
|
| [25] |
DAI J, QI H, XIONG Y, et al. Deformable convolutional networks[C]. Proceedings of the IEEE international conference on computer vision. 2017:764773.
|
| [26] |
ZHU X, HU H, LIN S, et al. Deformable convnets v2: More deformable, better results[C]. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2019:9308-9316.
|
| [27] |
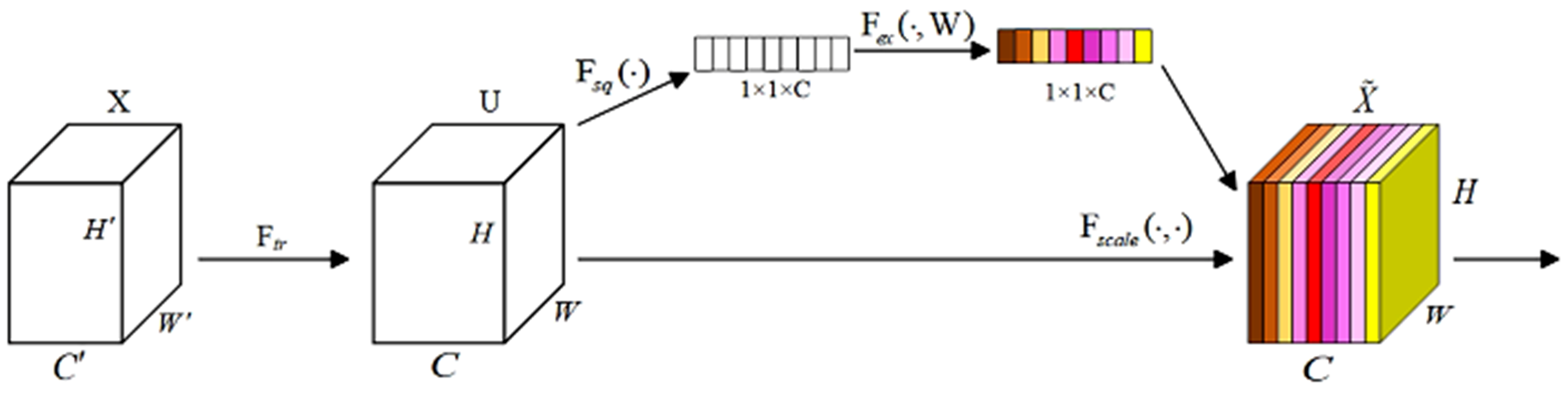
HU J, SHEN L, SUN G. Squeeze-and-excitation networks[C]. Proceedings of the IEEE conference on computer vision and pattern recognition. 2018:71327141.
|
| [28] |
TONG Z, CHEN Y, XU Z, et al. Wise-IoU: Bounding box regression loss with dynamic focusing mechanism[EB/OL]. [2023-10-20] https://arxiv.org/pdf/2301.10051.
|
| [29] |
ZHANG Y F, REN W, ZHANG Z, et al. Focal and efficient IOU loss for accurate bounding box regression. Neurocomputing, 2022, 506:146-157.
|
| [30] |
ZHORA G. SIoU Loss: More powerful learning for bounding box regression[EB/OL]. (2022-05-25)[2023-06-10] http://arxiv.org/pdf/2205.12740.pdf.
|
| [31] |
ZHENG Z, WANG P, LIU W, et al. Distance-IoU loss: Fasterand better learning for bounding box regression[C]. Proceedings of the AAAI Conference on Artificial Intelligence. Palo Alto, California USA: AAAI Press, 2020, 34(7):12993-13000.
|
| [32] |
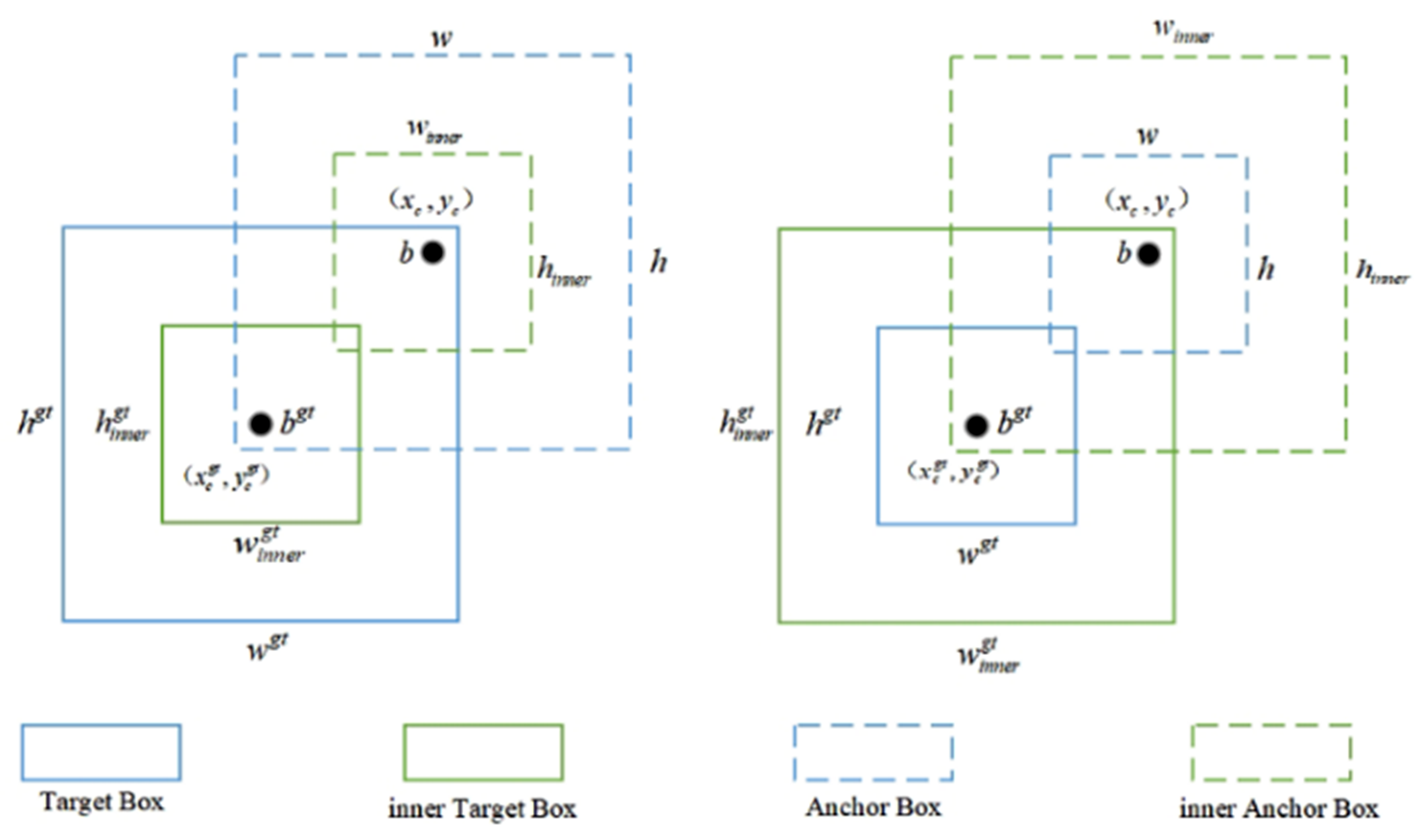
ZHANG H, XU C, ZHANG S. Inner-IoU: More effective intersection over union loss with auxiliary bounding box. arXiv preprint arXiv: 2311.02877, 2023.
|

 ), 马晓君1, 刘德胜2,*(
), 马晓君1, 刘德胜2,*(