| [1] |
MONTEIRO A, SANTOS S, GONÇALVES P. Precision agriculture for crop and livestock farming—Brief review. Animals, 2021, 11(8): 2345.
doi: 10.3390/ani11082345
|
| [2] |
TEAGUE R, BARNES M. Grazing management that regenerates ecosystem function and grazingland livelihoods. African Journal of Range & Forage Science, 2017, 34(2): 77-86.
|
| [3] |
UMSTATTER C. The evolution of virtual fences: A review. Computers and Electronics in Agriculture, 2011, 75(1): 10-22.
doi: 10.1016/j.compag.2010.10.005
|
| [4] |
ANDERSON D M. Virtual fencing-past, present and future1. The Rangeland Journal, 2007, 29(1): 65-78.
doi: 10.1071/RJ06036
|
| [5] |
MUMINOV A, NA D, LEE C W, et al. Monitoring and controlling behaviors of livestock using virtual fences. Journal of Theoretical and Applied Information Technology, 2019, 97(18): 1-12.
|
| [6] |
LEE M, SEO S. Wearable wireless biosensor technology for monitoring cattle: A review. Animals, 2021, 11(10): 2779.
doi: 10.3390/ani11102779
|
| [7] |
RUIZ-GARCIA L, LUNADEI L. The role of RFID in agriculture: Applications, limitations and challenges. Computers and Electronics in Agriculture, 2011, 79(1): 42-50.
doi: 10.1016/j.compag.2011.08.010
|
| [8] |
REGER M, STUMPENHAUSEN J, BERNHARDT H. Evaluation of LiDAR for the free navigation in agriculture. AgriEngineering, 2022, 4(2): 489-506.
doi: 10.3390/agriengineering4020033
|
| [9] |
NEETHIRAJAN S. Transforming the adaptation physiology of farm animals through sensors. Animals, 2020, 10(9): 1512.
doi: 10.3390/ani10091512
|
| [10] |
JACHOWSKI D S, SLOTOW R, MILLSPAUGH J J. Good virtual fences make good neighbors: opportunities for conservation. Animal Conservation, 2014, 17(3): 187-196.
doi: 10.1111/acv.2014.17.issue-3
|
| [11] |
AWAD A I. From classical methods to animal biometrics: A review on cattle identification and tracking. Computers and Electronics in Agriculture, 2016, 123: 423-435.
doi: 10.1016/j.compag.2016.03.014
|
| [12] |
NYAMURYEKUNG’E S, COX A, PEREA A, et al. Behavioral adaptations of nursing brangus cows to virtual fencing: insights from a training deployment phase. Animals, 2023, 13(22): 3558.
doi: 10.3390/ani13223558
|
| [13] |
SWAIN D L, FRIEND M A, BISHOP-HURLEY G J, et al. Tracking livestock using global positioning systems-are we still lost?. Animal Production Science, 2011, 51(3): 167-175.
doi: 10.1071/AN10255
|
| [14] |
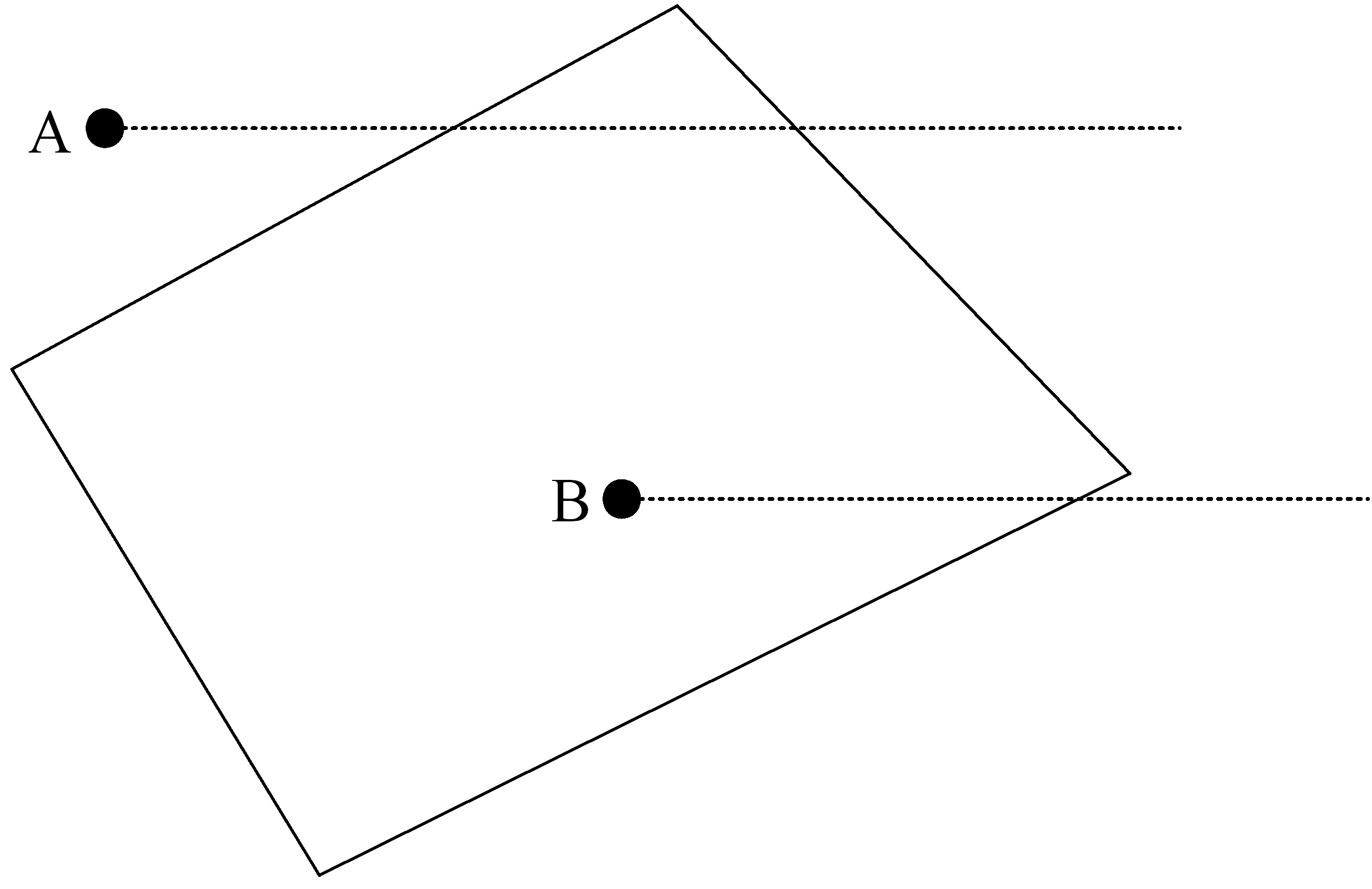
HUANG C W, SHIH T Y. On the complexity of point-in-polygon algorithms. Computers & Geosciences, 1997, 23(1): 109-118.
doi: 10.1016/S0098-3004(96)00071-4
|
| [15] |
SAWALL M, NEYMEYR K. A ray casting method for the computation of the area of feasible solutions for multicomponent systems: Theory, applications and FACPACK-implementation. Analytica Chimica Acta, 2017, 960: 40-52.
doi: S0003-2670(16)31420-9
pmid: 28193361
|
| [16] |
YU D, HE L, YE F, et al. Unsupervised ground filtering of airborne- based 3D meshes using a robust cloth simulation. International Journal of Applied Earth Observation and Geoinformation, 2022, 111: 102830.
doi: 10.1016/j.jag.2022.102830
|
| [17] |
JIA Z S, CHEN D Y, WANG B. Research on improved ray casting algorithm and its application in three‐dimensional reconstruction. Shock and Vibration, 2021, 2021(1): 8718523.
doi: 10.1155/vib.v2021.1
|
| [18] |
MEISTER D, OGAKI S, BENTHIN C, et al. A survey on bounding volume hierarchies for ray tracing[C]// Computer Graphics Forum. 2021, 40(2): 683-712.
|
| [19] |
HORMANN K, AGATHOS A. The point in polygon problem for arbitrary polygons. Computational Geometry, 2001, 20(3): 131-144.
doi: 10.1016/S0925-7721(01)00012-8
|
| [20] |
VERSLUIJS E, TOFASTRUD M, HESSLE A, et al. Virtual fencing in remote boreal forests: performance of commercially available GPS collars for free-ranging cattle. Animal Biotelemetry, 2024, 12(1): 33.
doi: 10.1186/s40317-024-00389-8
|
| [21] |
RANACHER P, BRUNAUER R, TRUTSCHNIG W, et al. Why GPS makes distances bigger than they are. International Journal of Geographical Information Science, 2016, 30(2): 316-333.
pmid: 27019610
|
| [22] |
GERHARDT A, La MANNA F, REUTER R. A pilot study: Training cattle to virtual fence management in groups. Rangelands, 2025, 47(1): 34-40.
doi: 10.1016/j.rala.2024.08.004
|
| [23] |
BRENNAN J, JOHNSON P, OLSON K. Classifying season long livestock grazing behavior with the use of a low-cost GPS and accelerometer. Computers and Electronics in Agriculture, 2021, 181: 105957.
doi: 10.1016/j.compag.2020.105957
|
| [24] |
SUN W, CHEN L, HU B, et al. Binocular vision-based position determination algorithm and system[C]// 2012 International Conference on Computer Distributed Control and Intelligent Environmental Monitoring. IEEE, 2012: 170-173.
|
| [25] |
El MORR C, JAMMAL M, ALI-HASSAN H, et al. Data preprocessing[M]// Machine learning for practical decision making :a multidisciplinary perspective with applications from healthcare, engineering and business analytics. Cham: Springer International Publishing, 2022: 117-163.
|
| [26] |
DHAWAS P, DHORE A, BHAGAT D, et al. Big data preprocessing, techniques, integration, transformation, normalisation, cleaning, discretization, and binning[M]// Big Data Analytics Techniques for Market Intelligence. IGI Global Scientific Publishing, 2024: 159-182.
|
| [27] |
GANSKOPP D C, JOHNSON D D. GPS error in studies addressing animal movements and activities. Rangeland Ecology & Management, 2007, 60(4): 350-358.
doi: 10.2111/1551-5028(2007)60[350:GEISAA]2.0.CO;2
|
| [28] |
SINGH D, SINGH R, GEHLOT A, et al. An imperative role of digitalization in monitoring cattle health for sustainability. Electronics, 2022, 11(17): 2702.
doi: 10.3390/electronics11172702
|
| [29] |
LIU J, YANG D, ZHANG K, et al. Anomaly and change point detection for time series with concept drift. World Wide Web, 2023, 26(5): 3229-3252.
doi: 10.1007/s11280-023-01181-z
|
| [30] |
LAASS M. Point in polygon tests using hardware accelerated ray tracing[C]// Proceedings of the 29th International Conference on Advances in Geographic Information Systems. 2021: 666-667.
|
| [31] |
MUSINSKA J, SKALICKOVA S, NEVRKLA P, et al. Unlocking potential, facing challenges: A review evaluating virtual fencing for sustainable cattle management. Livestock Science, 2025: 105693.
|

 ), KONG FanTao3,4, CAO ShanShan2,4, SUN Wei2,4,*(
), KONG FanTao3,4, CAO ShanShan2,4, SUN Wei2,4,*(